
Statics

In this lab, we will investigate the conditions for static equilibrium. Then, we will use those conditions and resulting relationships to determine an unknown mass.
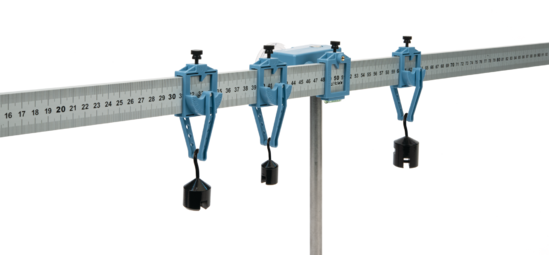
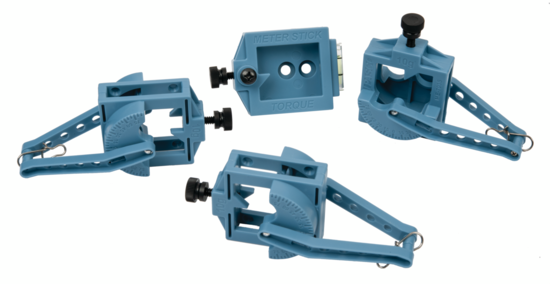
- 1 low friction, rotary lab stand mount for a meter stick
- 1 aluminum meter stick with 2 hangers (10 grams each)
- Various known masses
- 1 lab stand connected to a Vernier Force sensor
- LabQuest or LabPro to read the force sensor
- A protractor
- Record data in this Google Sheets data table
At some point in an introductory physics course, after learning about kinematics and dynamics, in linear and circular motion, we get to apply this knowledge to an exciting and important application: systems that do not move1. This may seem disappointing at first but the study of static equilibrium (and extension into dynamic equilibrium) is crucial to any field where structures need to stay intact. This includes, but is not limited to, mechanical engineering, civil engineering, orthopedics and physical therapy.
In two dimensions (so, a 3-D object but only moving or rotating in one plane) the condition for static equilibrium of an object is that net forces and torques on that object are zero, ie:
$$\Sigma F_x= 0, \Sigma F_y= 0, \Sigma \tau= 0 $$To evaluate the torque about an axis (the point where the axis intersects the plane of rotation is the pivot or fulcrum ), we use
$$ \vec{\tau} = \vec{r} x \vec{F}, \tau=rF\sin{\theta} $$where \(r\) is the moment arm, or distance from the point at which the force acts to the pivot. \(\theta\) is the angle between the force and a vector which points from the pivot to where the force acts (\(\vec{r}\)). The resulting vector torque \(\vec{\tau}\) points out, perpendicular to the plane created by \(\vec{r}\) and \(\vec{F}\). The cross-product relationship gives us that a torque pointing toward us seeks to create counterclockwise (ccw) rotation and a torque vector pointing away creates clockwise (cw) rotation. In cases where \(\theta = 90^\circ \), the torque is simply \(\tau=rF\); we take ccw as positive torque and cw as negative.
For Parts I and II of this experiment, one can simplify the problem even more. Masses hung to the left of the fulcrum experience a gravitational force which makes a counterclockwise torque on the system. Masses hung to the right of the fulcrum experience a \(\ F_{grav}\) which makes a clockwise torque on the system. It is the balancing of these torques which we investigate in Parts I and II.
In Part III we add a string which contributes a tension, \(F_{string}\), on the system. This string is connected to the left of the fulcrum but makes a clockwise torque because there is a component of the force \(F_{string}\sin{\theta}\) which is "up". Note that we are taking \(\theta\) to be the angle between the meter stick and the string.
Since the system is static we can choose the point about which to evaluate the torques; the sum of torques is zero about any pivot. Often we choose a complicated point, where forces which we do not know are acting and, hence, have a moment arm of zero.
For the system in Part III, we take the rotary mount of the meter stick to be the pivot and ccw torques positive, resulting in the expression:
$$\Sigma \tau = 0 = m_{extraweight}gr_{extraweight} + m_{stick}gr_{stick} - F_{string}r_{string}\sin{\theta} $$
We will be identifying positions along the meter stick as \( x \), such as \( x_{string hanger}\). In general, the relevant distance at which a torque acts, its moment arm \( r \) , is \( r = x_{where-torque-acts} - x_{pivotpoint} \) .
Part I: Balancing Torques
Begin by sliding the aluminum meter stick into its low friction, rotary mount and balancing it in the mount. This will happen when the mount indicator is close to \(50cm\); use the spirit level bubble to set this point carefully. Tighten the attachment screw then record the position.2
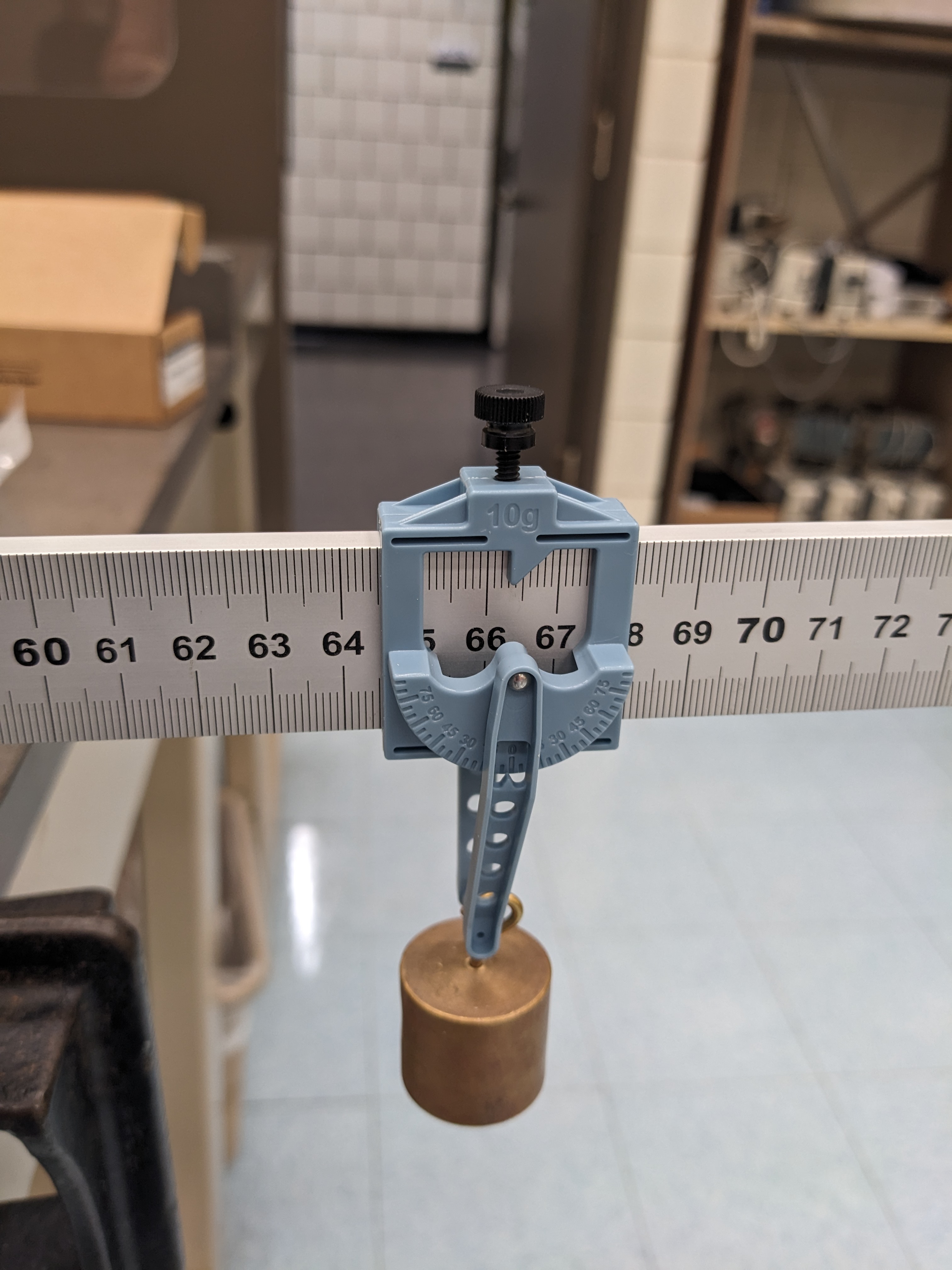
Slide a hanger onto the left (positions \(\lt 50cm\)) side of the ruler and add mass to the hanger as listed in your data sheet. Now add a hanger and mass to the right side (positions \(\gt 50cm\)) and adjust the position of the hanger until the system is balanced, ie. the meter stick is horizontal. Record the positions of each mass, with uncertainty.
Repeat the above steps for the other mass combinations, in all, 5 pairs. Remember that the hangers each have mass of \( 10 \) grams.

Part II: Determining the Mass of the Meter Stick
In Part I, we centered the meter stick so that it did not contribute to the counter-clockwise (ccw) or clockwise (cw) torques. In this part, we will determine the mass of the meter stick by mounting it off-center and seeing what is needed to balance it.
Remove the hanger from the left (\(\lt 50cm\)) side of the meter stick. While holding the meter stick up, slide the meter stick until the rotary mount is about the \( 70cm\) point. Now put a 100 gram mass on the right side hanger and slide until the meter stick balances. Record the balance point of the meter stick and location of the hanger plus 100 gm mass when the system is in equilibrium.
Part III Option A: Determining the Mass of the Meter Stick, again
Remove any hanger from the meter stick and take it out of the rotary mount, Weigh it on a scale and estimate the associated uncertainty.
Part III Option B: Determining the Mass of the Meter Stick, again
Click here for details of PartIII, Option B
Open the LoggerPro program on the computer (or grab your LabQuest device). You do not need a .cmbl (named, experiment) file for this lab. A force sensor is mounted near the top of your lab stand; it should be connected to the LabPro (or LabQuest) on analog input #1. You will see display of the force in Newtons (N).
- To test the force sensor, give a gentle tug on the hook and see that the force value increases;
- Ensure that there is nothing hanging from the Force Sensor other than its own hook;
- If the reading is \(\lt \lvert{0.003}\rvert N\) then take no action. If the "zero" reading is \(\gt \lvert{0.003}\rvert N\), go to the Experiment tab in LoggerPro and click "Zero".
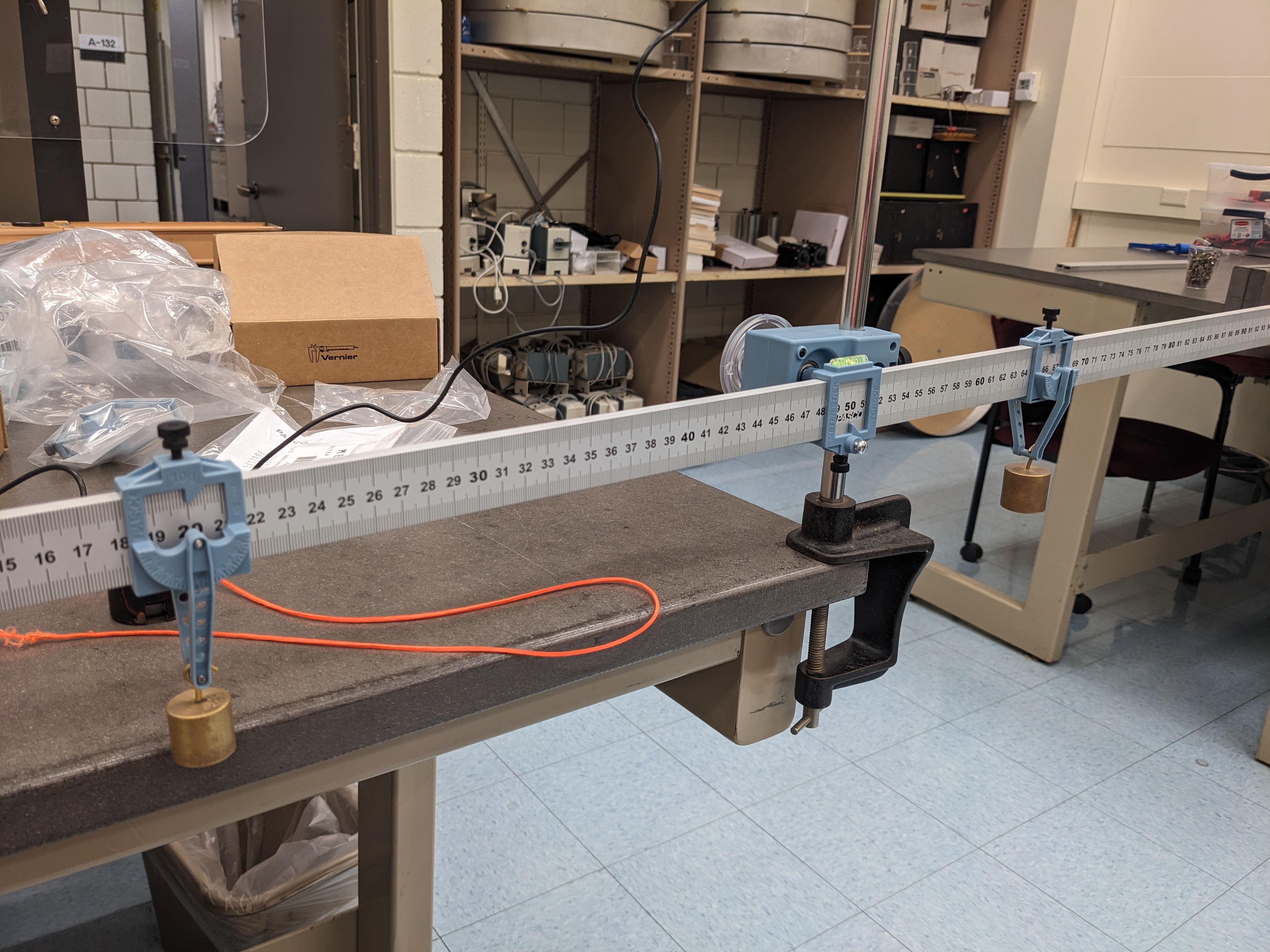
Loosen the screw on the rotary mount for the meter stick. Remove the hanger from the right end of the meter stick and return a hanger (hook down) to the left side. Attach a hanger with string to the left, hook up, and tighten it at ~ 5 cm point.7 Loop the string over the hook on the force sensor and rotate the force sensor so that the hook and string aligned.
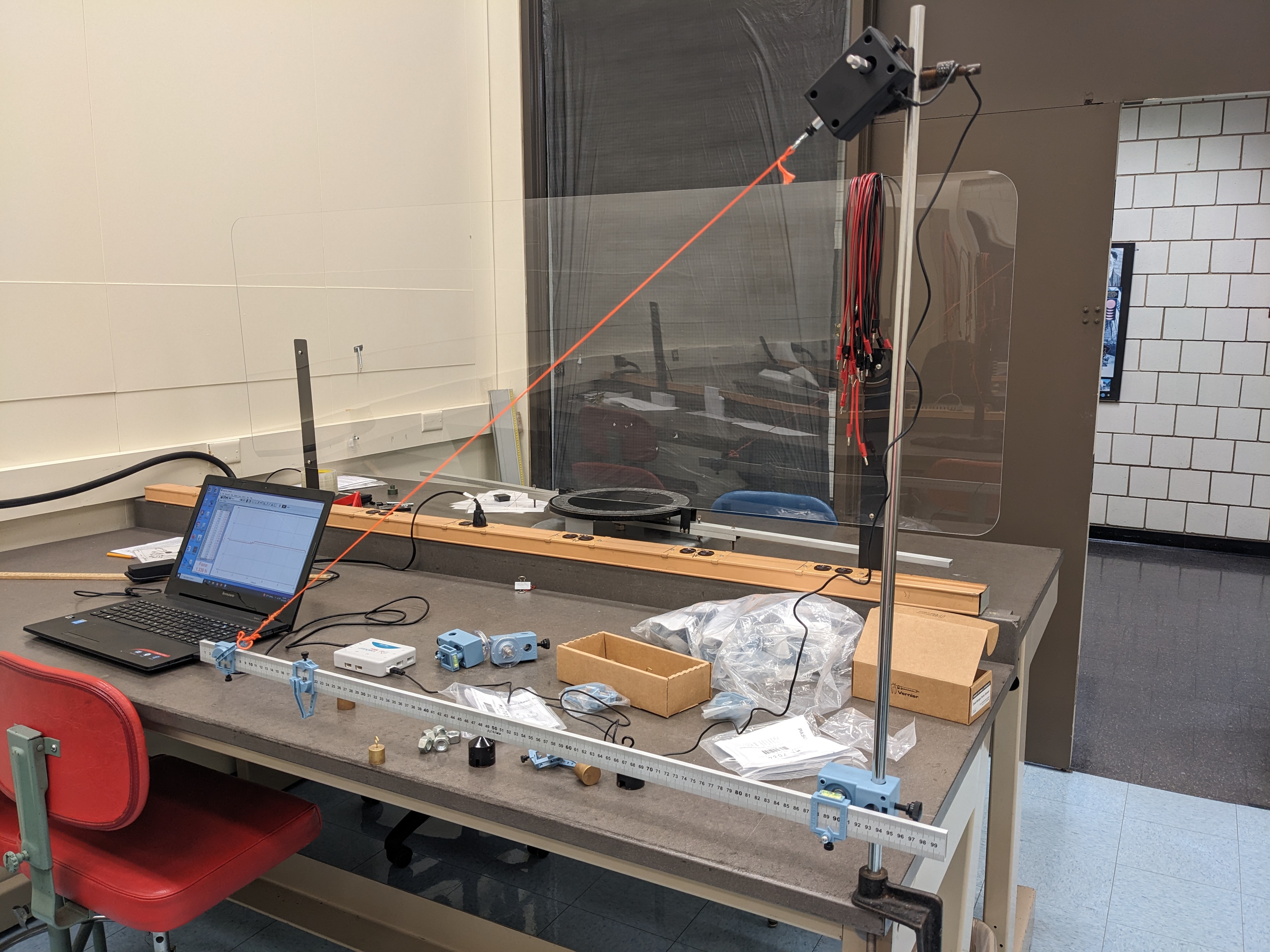
Now, slide the meter stick until it is level (use the the bubble level on the rotary mount) and tighten the rotary mount's screw. The apparatus should look like Figure 4.

Using a protractor, measure the angle between the meter stick and the string. Record with estimated uncertainty.
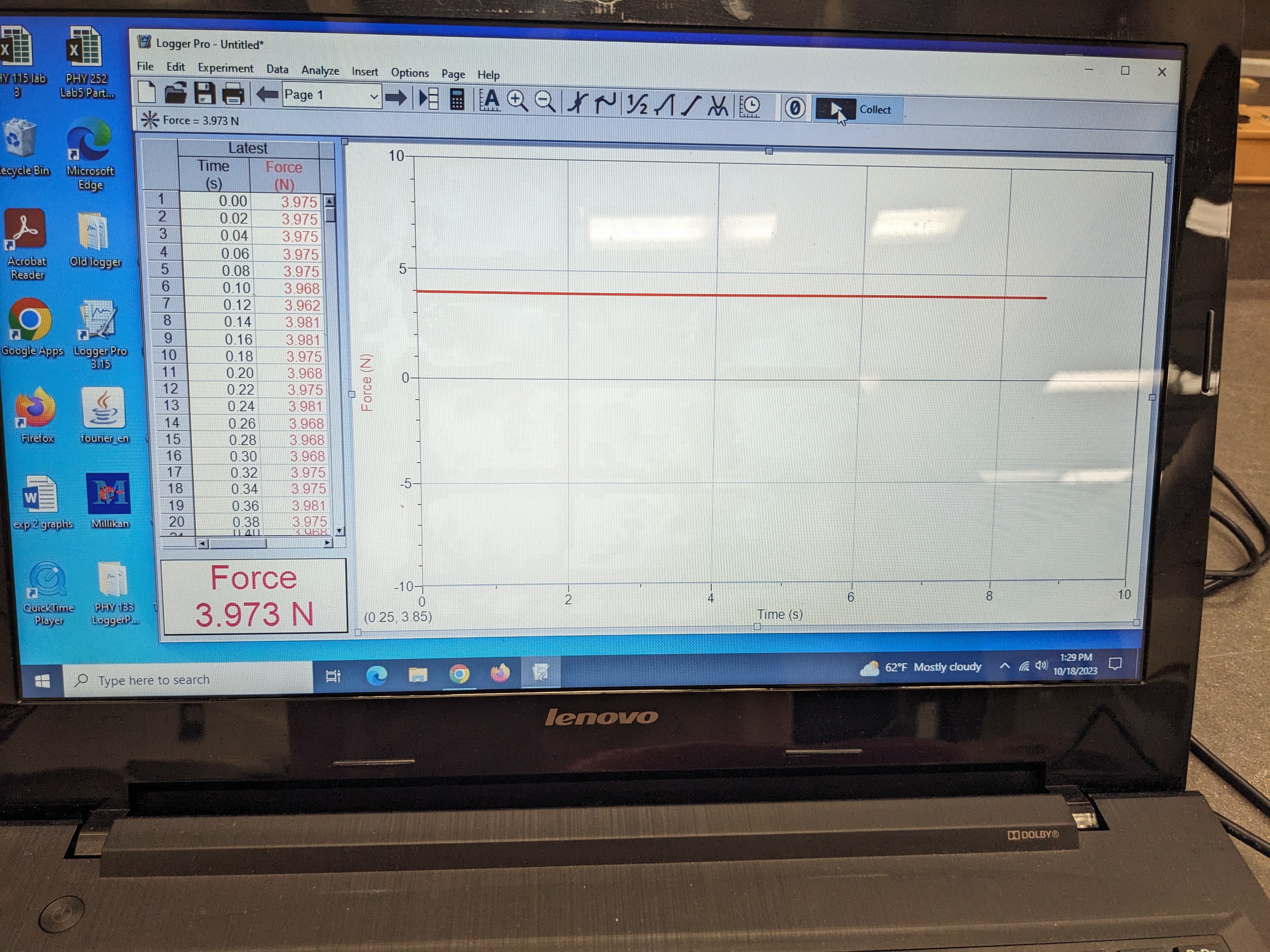
Move the left hanger to ~20 cm and add a 200 gram mass. Record the hanger position and the force sensor value from LoggerPro.
Part I: Balancing Torques
For all 5 mass combinations, calculate the positive (counter-clockwise) and negative torques on the meterstick plus masses system. Propagate uncertainties. Do the torques balance in each case?
Part II: Determining the Mass of the Meter Stick
In our models, the weight of the meter stick is a force which acts at the center-of-mass, ideally, the \(50cm\) point. Since the system is in balance, counter-clockwise torques equal the clockwise torques, so, if \(m_{stick}\) is the mass of the meter stick and \(x_{hanger}\) is the position of 100 gram mass (plus hanger), \(m_{stick}\) can be found (in grams) by
$$m_{stick} = (x_{hanger}-x_{balance})*110/(x_{balance}-50) $$Do the calculation for \(m_{stick}\), noting that \(x_{balance} \approx 70cm)\).
Part III, Option A: Determining the Mass of the Meter Stick, again
Compare the mass value from the scale with the value you found in Part II. Do they agree?
Part III, Option B: Determining the Mass of the Meter Stick, again
Taking Equation 3 and solving for the mass of the meter stick we get:
$$ m_{stick} = (F_{string}r_{string}\sin{\theta} - 0.210gr_{200gm} )/(gr_{stick}) $$The above equation assumes that we use \( g = 9.80 m/s^2 \) which will give the mass of the meter stick in kg. .3 3
For uncertainty in \(m_{stick}\), the proper calculation is difficult. For this lab, assume that the fractional (relative) uncertainty in \(m_{stick}\) is the same as the largest fractional uncertainty in the terms of Equation 5. Does your \(m_{stick}\) agree with the value you got from Part II?
Your TA will ask you to answer some of the following questions (they will tell you which ones to answer):
Experimental questions, all Parts:
- How would the results have been different, if at all, if the meter stick had been balanced at 51 cm instead of at its center of mass? Justify your answer.
- How would the results have been different, if at all, if the meter stick had not been horizontal when it was "balanced"? Justify your answer.
Part II: Determining the Mass of the Meter Stick
- How would the results have been different, if at all, if the meter stick mount had had significant friction? Justify your answer.
- If the meter stick had been significantly heavier, do you expect that your results would have been more accurate or less accurate? Justify your answer using ideas from physics.
Theoretical questions:
- What if the cow were spherical?
- What if you or your lab partner were massless?
- What would happen if gravity became repulsive during the measurements in Part III?
- Why?
Hovering over these bubbles will make a footnote pop up. Gray footnotes are citations and links to outside references.
Blue footnotes are discussions of general physics material that would break up the flow of explanation to include directly. These can be important subtleties, advanced material, historical asides, hints for questions, etc.
Yellow footnotes are details about experimental procedure or analysis. These can be reminders about how to use equipment, explanations of how to get good results, or clarifications on details of frequent confusion.
For more about torque and static equilibrium, see KJF Ch. 7, plus Ch. 8.1 and 8.2.
You may find the Guide to Making and Using Plots
Value is from NOAA for Latitude: 40.91597332879679, Longitude: -73.12491620370486, MSL Height: 41.0 Predicted gravity: 980269 +/- 2 milligals where a "gal" is a centimeter per second squared
For an object moving at a non-constant speed in a circle, that formula still holds for the component of force perpendicular to motion, but there is also a component of force parallel to motion to change the speed.
Slightly more accurately, we work with three components: a vertical component, a radial component, and a tangent (parallel to velocity) component. But there are no forces in the tangent direction (we aren't varying speed), so there's no reason to discuss it.
For convenience, we'll say "radius" to refer to \(R\), even though it's not really the radius (since \(r\) is actually the radius of orbit).
We can fix the length above the tube by fixing the length below the tube. This is where the "cord clamp" comes into play: by spinning with it located some fixed, known length below the bottom of the tube, we can also have a fixed, known length \(R\) above the top of the tube.
Take your uncertainty in these position readings to be at least 1 mm.
To stay in cgs, use \(g= 980 cm/s^2 \) and convert Force to whatever the cgs unit is.
So, to reiterate, make sure all of the following are true:
- The clamp remains steadily ~1cm below the bottom of the tube. Under no conditions should it ever touch the bottom of the tube during the time you are measuring.
- Your hand should only touch the tube, and no other part of the apparatus during the experiment (in particular, not touching the string) while measurements are taken.
- The stopper is swinging approximately in a horizontal plane.
- The hanging washers should not be swinging (much).
Hook down also works if you tie the string to the tightening screw.